飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
关注我们

飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
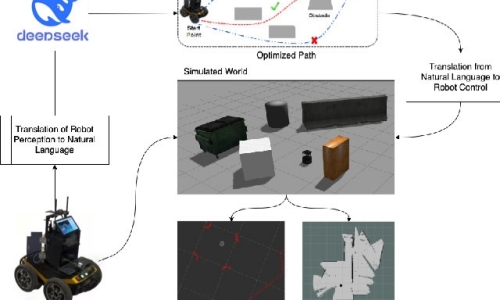
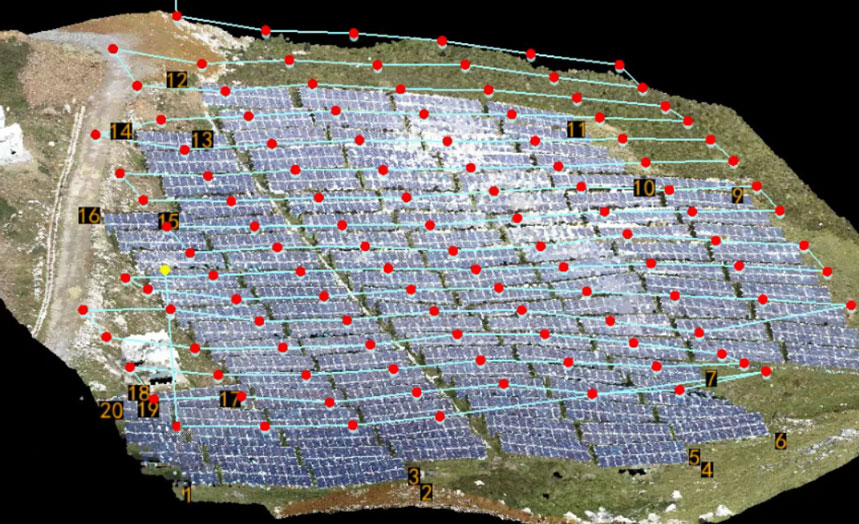
光伏场站的割草需要割草机在光伏板下方进行导航,以清除杂草。光伏板下的环境可能比较复杂,有支架、电缆、可能的障碍物,以及需要避开的结构。传统的导航方法可能在复杂环境下不够精准,因此需要融合LiDAR和视觉识别来提高导航的准确性和适应性。
环境适应性:在光伏板下方复杂环境(支架、电缆、杂草、不平地面)中实现厘米级导航精度。
实时性要求:从数据采集到路径规划的全流程延迟 ≤ 100ms。
能效优化:嵌入式系统功耗 ≤ 15W,支持8小时连续作业。
| 模块 | 规格 | 指标 |
|---|---|---|
| LiDAR传感器 | Ouster OS1-64(车规级) | 64线,探测距离120m,精度±2cm |
| 视觉模组 | Sony IMX678全局快门相机 + DeepSeek定制ISP | 分辨率1920×1200@60fps,动态范围120dB |
| 边缘计算单元 | NVIDIA Jetson AGX Orin | 算力275TOPS,支持CUDA加速 |
| 定位模块 | U-blox ZED-F9P RTK-GNSS | 定位精度±1cm + 1ppm(固定解状态) |
| 惯性导航 | ADIS16470 MEMS IMU | 角速度随机游走0.15°/√hr |
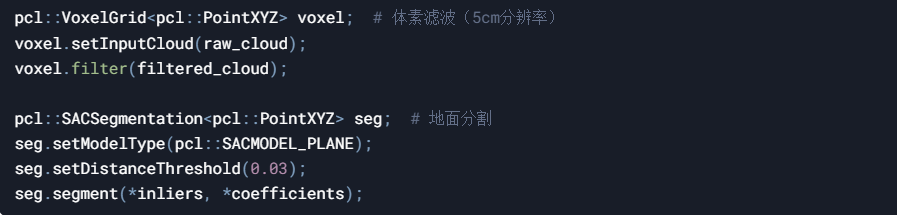
LiDAR点云处理
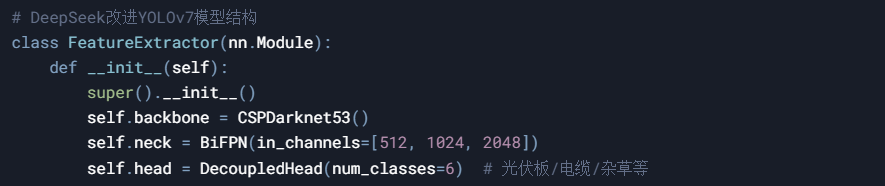
视觉特征提取
时空对齐模块:
硬件同步:采用PTP协议实现LiDAR与相机μs级同步
坐标转换:标定外参矩阵 TLidarCam = [R t]
动态补偿:通过IMU数据修正运动畸变
局部避障

本方案通过多模态传感器融合,在光伏板下方特殊场景下实现了超越单传感器方案的导航可靠性。