飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
江苏省南通市崇川区中科科技园5栋
姓名:马经理
电话: 182-6101-6283
服务内容:农业机器人
响应时间:工作日内24小时反馈
姓名:单经理
电话: 132-7529-2567
任选一位工程师联系,皆可获取同等专业服务,快速响应不等待!
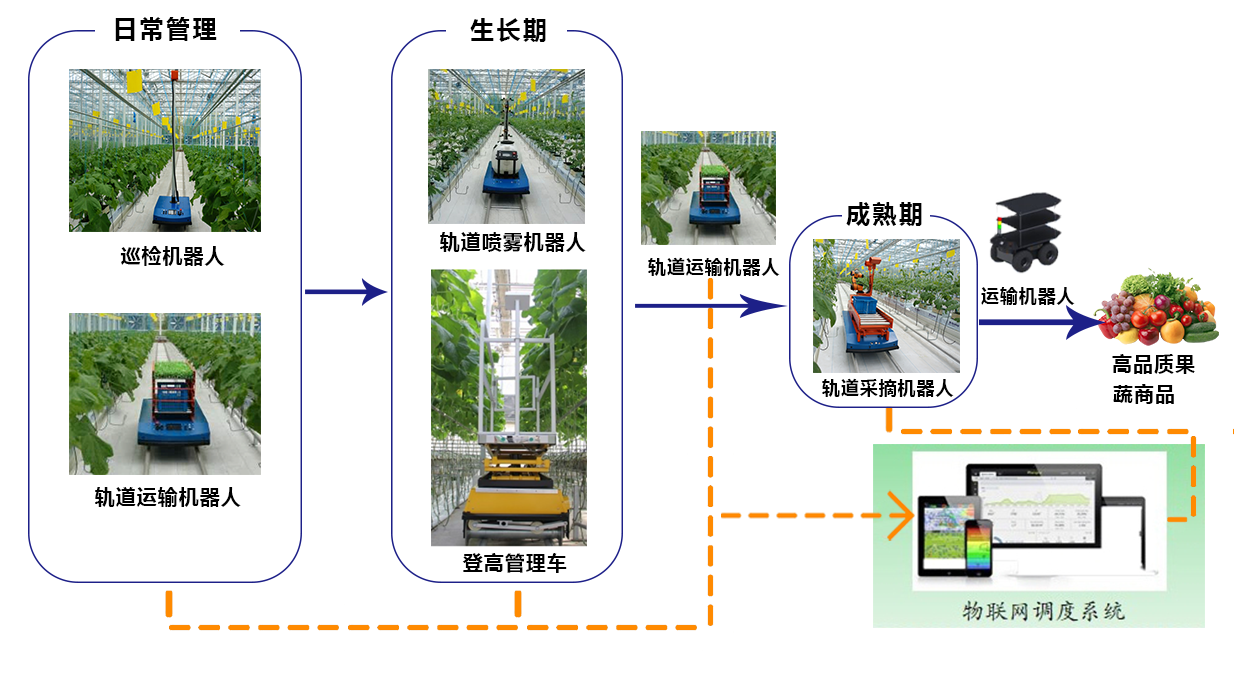
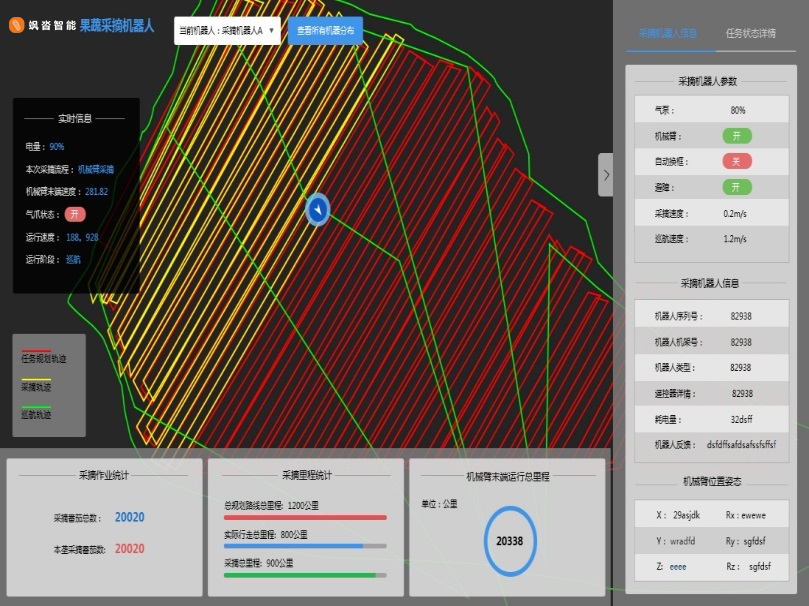
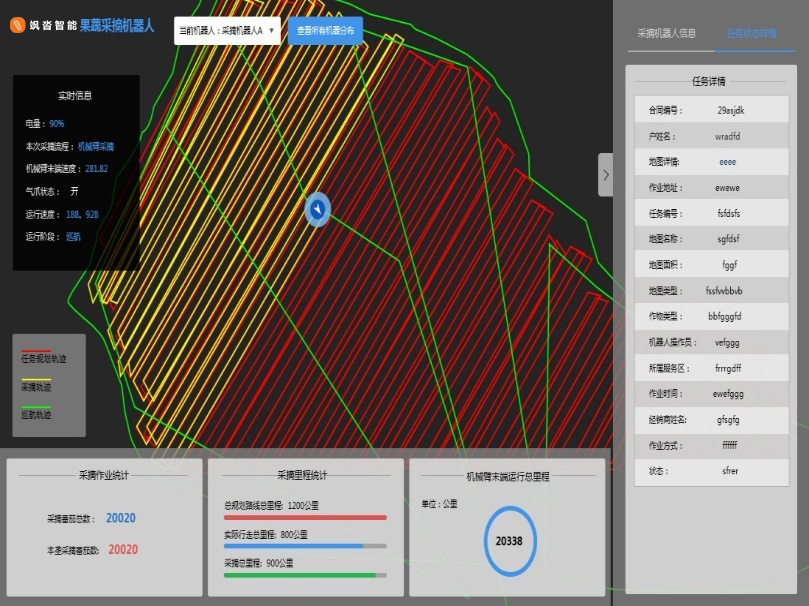
全自主智能化巡检
通过物联网远程控制,实现屏幕端和手机端的实时预警和监控。
智能化植保作业
根据专家建议,自动启动喷雾机器人进行高效植保。
自动化采收和物流
采收机器人每15s采摘一串,单机覆盖1000m2,果实通过轨道运输机器人自动运送至分选包装线,实现全自动化物流。
高效作业
操作员通过登高管理车轻松完成田间落蔓、疏花疏果,效率高达2000m2/天。
农业机器人化生产系统流程图
设施生产机器人化整体解决方案
喷雾机器人系统
精准喷雾系统
结合导航系统、栽培模式,实现喷杆折叠、喷头控制等喷雾方式的转换; 采用视觉或激光传感器,实现对作业对象的定位和识别,实现对靶变量喷雾。
环境智能感知与自主避障
环360°雷达通过不间断扫描,可预先探测作业环境和障碍物信息,并根据所处环境及时调整行走策略,实现自主避障。
多地形作业与导航
针对农业地形和材质的多样性,提供履带式、轮式或轨道式多种行走系统和驱动方式满足不同场景要求; 搭载视觉完成路径规划和导航。
轨道运输机器人系统
位置精准定位
通过视觉导航和轨道定位等相结合,实现车体的位置的精确定位。
轨道式和轮式行走系统,可以实现轨道和水泥地面的无缝对接;辅以动力匹配、结构优化,轻松完成作业环境转换。
巡检机器人系统
作物实时感知系统
采用多波段视觉传感器,实现温室内部环境、作物生长状态的实时感知,预警温室结构完整度、胁迫等发生。
环境智能感知
搭载环境传感器,与温室物联网实时通信,将温室内环境分布情况回馈到控制中心,便于进行环控操作。 环360°雷达通过不间断扫描,可预先探测作业环境和障碍物信息,并根据所处环境及时调整行走策略,实现自主避障。
针对农业地形和材质的多样性,提供轮式或轨道式多种行走系统和驱动方式满足不同场景要求。
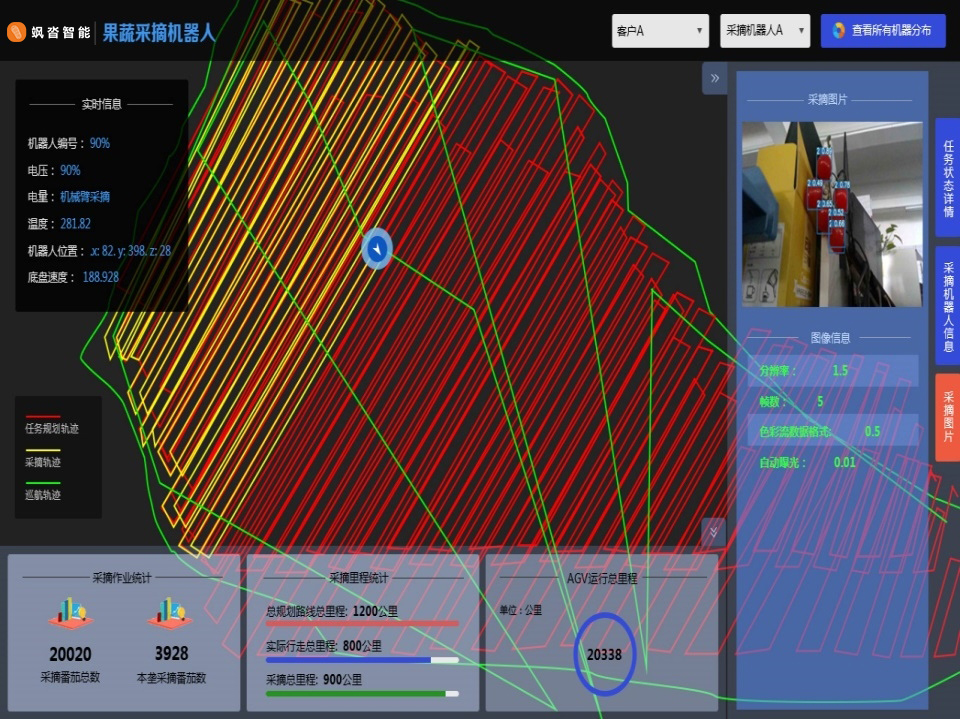
图像采集
果实识别
运输机器人系统
通过磁导航和室内定位相结合,实现车体的位置的精确定位。
轮式行走系统和驱动方式满足不同场景要求; 具有全自主和人工驾驶两操作模式; 可连接挂车完成大负载运输。
登高管理车
多路面全自主行走系统
实现轨道和水泥地面的完全非人力行走。
整机优化
调速优化,起停平稳。 升高达到3.5米,重心优化。 操作系统集中配置,人机交互优化。
超长作业时间
作业时间达到8小时。
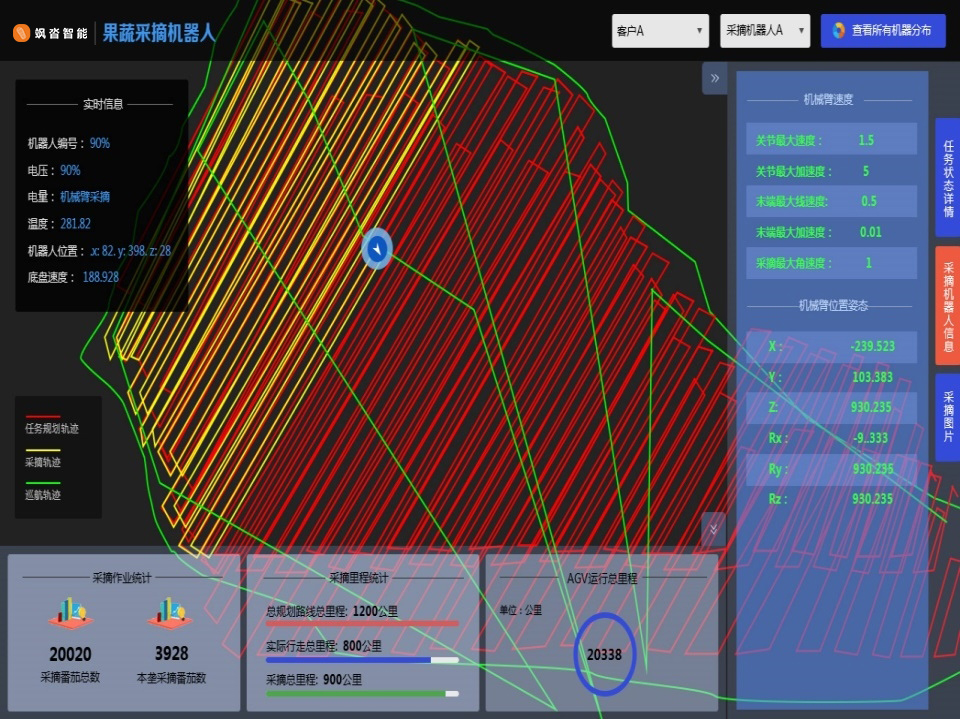
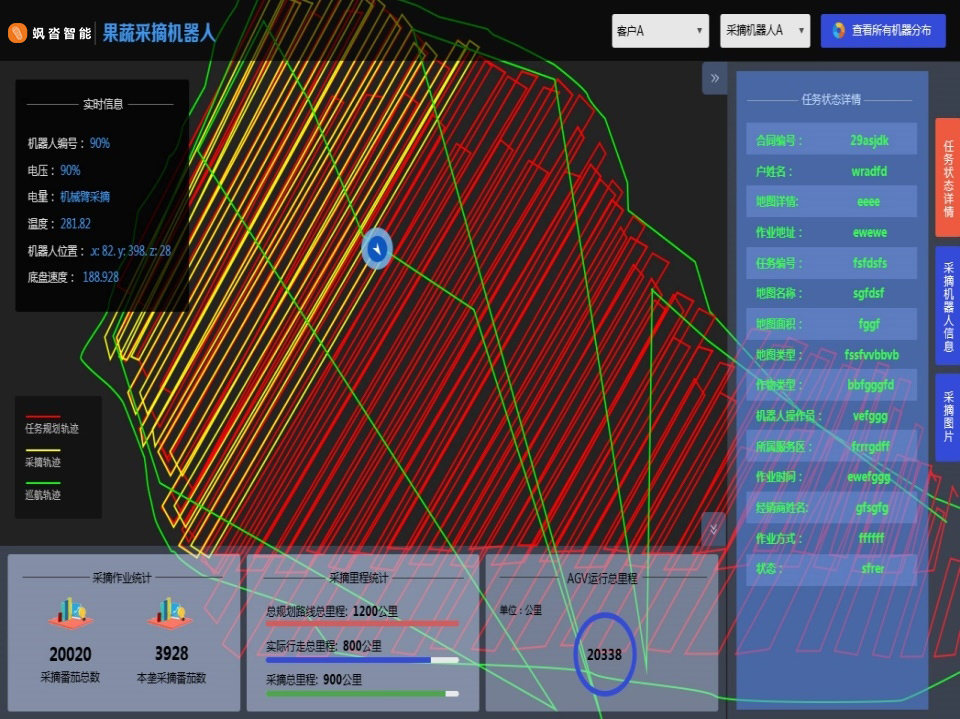
果蔬采摘机器人系统
果实精准采收
双目立体视觉精准判别果蔬的大小、颜色、形状、成熟度和采摘位置;轻巧型多自由度机械臂完成路径规划、采摘和放篮任务;柔性采摘手自适应控制抓取,不伤果;根据作物特点,采用按个或按串多种采收方式。
农机农艺融合新模式
围绕选择性收获,结合作物品种,栽培模式和机器人的交互方式,构建针对作物的智慧栽培系统。