飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
关注我们

飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
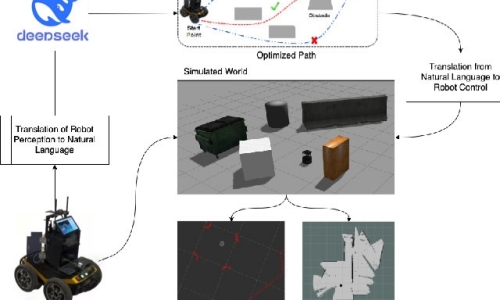
割草机的视觉识别系统主要依赖多传感器融合与AI算法实现环境感知与决策:
摄像头模组: 采用广角高清摄像头(分辨率≥1080P),配合红外补光技术,实现24小时环境监测。
激光雷达辅助: 部分高端机型集成激光雷达(如禾赛JT16),通过3D点云数据构建高精度地图,提升障碍物识别精度至厘米级。
AI算法: 基于深度学习的卷积神经网络(CNN),可识别草种类型(如早熟禾、黑麦草)、植被密度(误差率<5%)及障碍物类别(石头、花坛等)。
边界识别: 通过视觉SLAM技术自动识别草坪边界,误差控制在±5cm内,避免越界作业。
动态避障: 实时检测移动目标(如儿童、宠物),触发紧急制动,响应时间<0.3秒。
植被健康管理: 分析草高数据(精度±1mm),自动生成修剪路径,确保光伏板下方植被高度稳定在10-30cm。
| 指标 | 传统视觉方案 | AI增强视觉方案 |
|---|---|---|
| 识别精度 | 70%-80% | 95%+ |
| 夜间作业能力 | 依赖补光,范围受限 | 热成像辅助,无光环境可用 |
| 异形障碍物识别 | 仅识别预设形状 | 零样本学习,泛化能力强 |
| 多机协同效率 | 单机独立作业 | 云端共享地图,协同路径规划 |
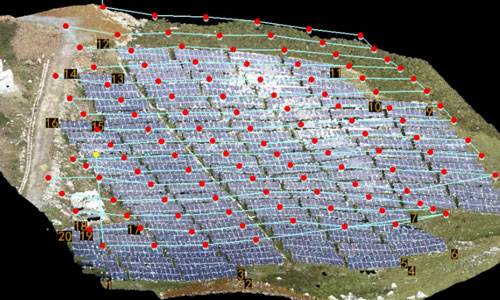
国家电投广西光泰电站: 部署搭载视觉识别系统的遥控割草机,通过AI分析光伏板下方植被生长状态,将割草作业效率提升30倍,运维成本降低80%。
德国莱茵TÜV认证机型: 采用VSLAM(视觉同步定位与地图构建)技术,在复杂庭院环境中实现98%的路径规划准确率,获欧盟CE安全认证。